
liebe Community, ich verfolge euer Projekt schon lange und bin wirklich begeistert und beeindruckt, was ihr hier auf die Beine gestellt habt.
Ich pendle täglich 14km mit dem Rad zur Arbeit und erlebe regelmäßig kritische Situationen und rücksichtslose Autofahrer*Innen (auch sehr vorbildliche Autofahrer, das sei der Vollständigkeit wegen erwähnt :). Ich hatte mir dann nach einer beinahe Kollision Dashcams für vorn und hinten besorgt, allerdings fehlte mir dort immer der Abstand als sichtbarer Parameter. Neben dem leider gescheiterten Projekt Dashbike bin ich bei der Recherche auch auf euren Open Bike Sensor gestoßen, der mich dazu motiviert hat ein experiment zu starten, das nun tatsächlich ziemlich weit gekommen ist. Von hier aus würde ich das Projekt nun gerne mit anderen Interessierte zusammen weiter entwickeln. Und da liegt eure Community für mich sehr nah, da ihr schon viele Diskussionen geführt und euch sehr viel Erfahrung erarbeitet habt.
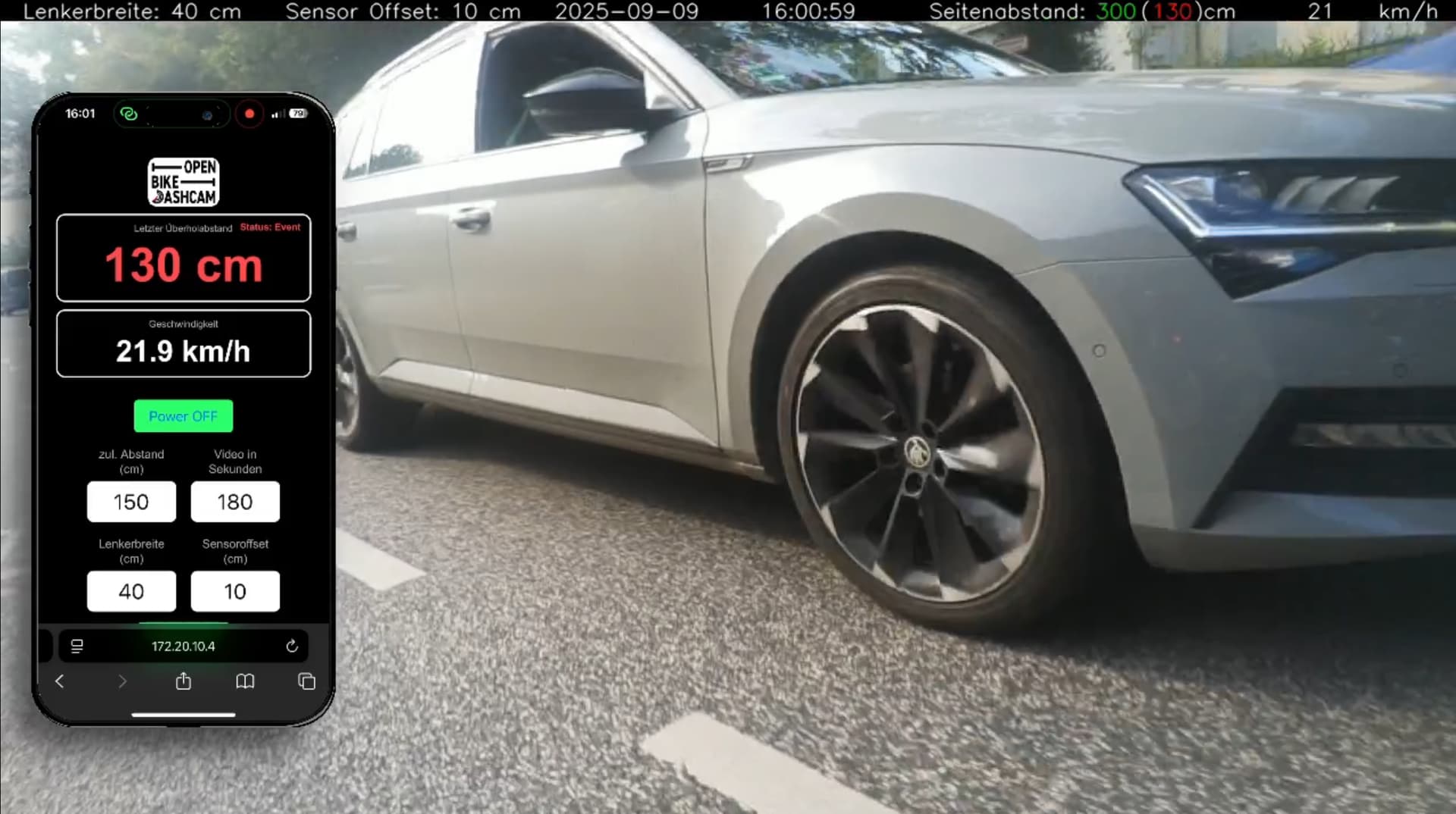
Das Prinzip ist eine Dashcam, die im Overlay auf dem Video live den aktuellen Seitenabstand, sowie den letzten Überholvorgang anzeigt. Die Überholabstände werden zusammen mit der aktuellen GPS Position in eine csv Datei zur späteren Auswertung geschrieben. Das Video läuft mit 30fps bei 720p. Trigger zum Sichern des aktuellen Videosegmentes ist ein Unterschreiten des Sicherheitsabstandes während der Aufnahmezeit. Im Prinzip gibts also zwei Einsatzzwecke. Der eine ist die Dashcam, die kritische Situationen möglichst gerichtsfest sichern soll. Darum habe ich mich auch dafür entschieden alle Informationen live ins Bild zu schreiben und nicht im Nachhinein Frames und Overlay über eine Dateimanipulation zu kombinieren. Der Zweite Einsatzzweck ist eher das Aufdecken grundsätzlicher Problemstellen über die CSV-Datei. Also die Ergänzung des OBS Projektes.
Basis ist ein Raspberry Pi 5, an den ein Radarsensor angeschlossen ist. Die Kamera guckt schräg zur Seite über die Straße, sodass man links im Bild die rückwärtige Straße und rechts in die „Blickrichtung“ des Radarsensors guckt und das seitliche Überholmaneuver erkennen kann. Es werden clips im Loop-Prinzip mit einer einstellbaren Länge, vorerst im RAM temporär aufgenommen. Wenn während der Aufnahme der zulässige Überholabstand von 150cm unterschritten wurde, wird das Video auf einem USB Stick zusammen mit der CSV-Datei gesichert.
Die Daten des Sensors (1 Messwert pro Frame) werden in eine csv Datei geschrieben. Die könnte so formatiert werden, dass das System optimalerweise den OBS ergänzen kann und in eure Datenbank integrierbar ist.
Das GPS Signal und die aktuelle Geschwindigkeit hole ich mir vom Smartphone. Auf dem Raspberry läuft dann eine kleine WebApp, die auf dem Smartphone am Lenker den letzten Überholabstand, sowie die aktuelle Geschwindigkeit und auch den aktuellen Videostatus (also ob der zulässige Abstand unterschritten und das Video gesichert wird) anzeigt.
unten noch ein Screenshot des Videos und der Web App. Das Video verlinke ich euch darunter.
Die Stromversorgung kommt aktuell noch von einer Power Bank. Und als Gehäuse dient mir bisher ein kleiner Versandkarton, den ich je nach Entwicklungsstadium leicht modifizieren konnte. Es besteht also noch sehr viel Entwicklungspotenzial. Als Arbeitstitel habe ich erstmal Open Bike Dashcam genommen. Das erschien mir sehr treffend 
Screenshot:
Video:

 ??
??
