Hi,
Thanks for the explanations. See here the logs when starting:
E (979) esp_core_dump_flash: No core dum�␆���ѥѥ�� found!
E (979) esp_core_dump_flash: No core dump partition found!
[ 12][D][esp32-hal-cpu.c:244] setCpuFrequencyMhz(): PLL: 480 / 2 = 240 Mhz, APB: 80000000 Hz
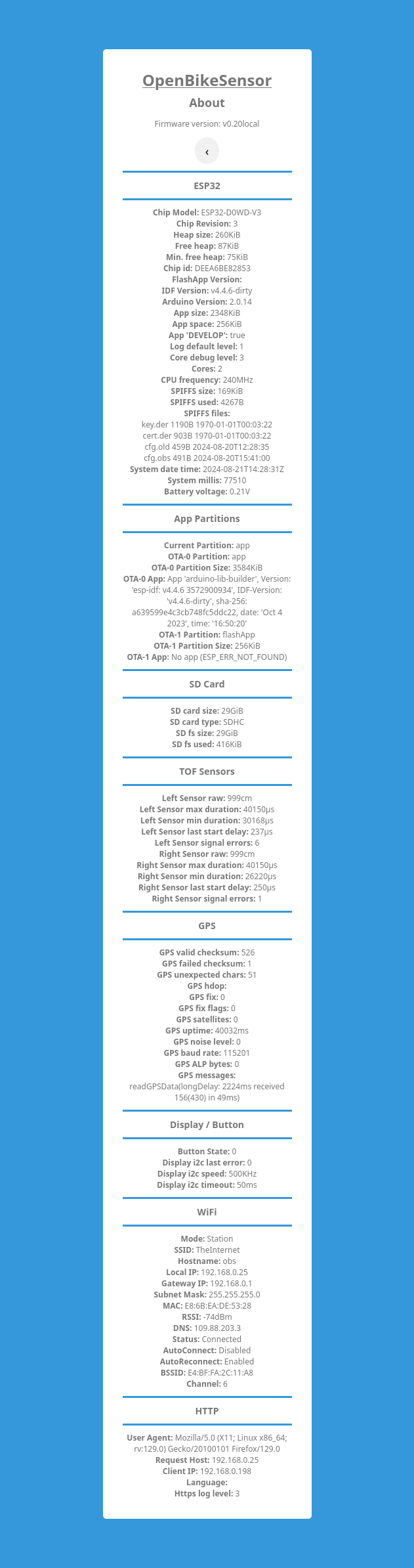
[ 42][I][OpenBikeSensorFirmware.cpp:199] setup(): openbikesensor.org - OBS/v0.20local
[ 43][I][esp32-hal-i2c.c:75] i2cInit(): Initialising I2C Master: sda=21 scl=22 freq=100000
[ 49][W][Wire.cpp:301] begin(): Bus already started in Master Mode.
[ 87][I][VoltageMeter.cpp:40] VoltageMeter(): Initializing VoltageMeter.
[ 88][I][VoltageMeter.cpp:54] VoltageMeter(): Characterized using eFuse Vref
[ 90][I][VoltageMeter.cpp:62] VoltageMeter(): eFuse Two Point: NOT supported
[ 97][I][VoltageMeter.cpp:66] VoltageMeter(): eFuse Vref: Supported
[ 106][I][VoltageMeter.cpp:75] VoltageMeter(): VoltageMeter initialized got 0.21V.
[ 166][D][OpenBikeSensorFirmware.cpp:618] loadConfig(): No configuration init from SD. SD: 1 File: 0
[ 173][I][OpenBikeSensorFirmware.cpp:621] loadConfig(): Load cfg
[ 179][D][config.cpp:308] loadConfig(): Loading config json from /cfg.obs.
[ 190][D][config.cpp:339] loadJson(): Config found in file 'cfg.obs':
{
"obs": [
{
"wifiSsid": "*****",
"wifiPassword": "*****",
"wifiNetworks": [*****],
"obsName": "OpenBikeSensor-2853",
"name": "default",
"bluetooth": false,
"offset": [
35,
35
],
"portalUrl": "https://portal.openbikesensor.org",
"httpPin": "111236",
"portalToken": "*****",
"displayConfig": 528,
"privacyConfig": 1,
"confirmationTimeSeconds": 5,
"selectedPreset": 0,
"privacyArea": []
}
]
}[ 263][D][config.cpp:341] loadJson(): ------------------------------------------
Dumping current configuration, current selected profile is 0:
{
"obs": [
{
"wifiSsid": "*****",
"wifiPassword": "*****",
"wifiNetworks": [*****],
"obsName": "OpenBikeSensor-2853",
"name": "default",
"bluetooth": false,
"offset": [
35,
35
],
"portalUrl": "https://portal.openbikesensor.org",
"httpPin": "111236",
"portalToken": "*****",
"displayConfig": 528,
"privacyConfig": 1,
"confirmationTimeSeconds": 5,
"selectedPreset": 0,
"privacyArea": []
}
]
}
[ 1024][V][gps.cpp:688] encode(): Expecting UBX Payload: 2 bytes
[ 1025][E][gps.cpp:841] parseUbxMessage(): ACK-NAK 0x3406
[ 1025][E][gps.cpp:361] sendAndWaitForAck(): Failed to send cfg. 0x3406 NAK: 1 after 4ms
[ 1032][I][gps.cpp:287] setBaud(): GPS startup already 115200
[ 1038][I][gps.cpp:180] softResetGps(): Soft-RESET GPS!
[ 1298][V][gps.cpp:724] encode(): Start of GPTXT
[ 1299][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,MA=CASIC*27
[ 1300][V][gps.cpp:724] encode(): Start of GPTXT
[ 1305][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,HW=ATGM332D,0000090809339*1B
[ 1314][V][gps.cpp:724] encode(): Start of GPTXT
[ 1319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,IC=AT6558-5N-71-0C510800,AH01CLJ-D4-011686*57
[ 1330][V][gps.cpp:724] encode(): Start of GPTXT
[ 1335][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,SW=URANUS5,V5.2.1.0*1D
[ 1344][V][gps.cpp:724] encode(): Start of GPTXT
[ 1348][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,TB=2019-08-12,10:01:41*4E
[ 1358][V][gps.cpp:724] encode(): Start of GPTXT
[ 1362][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,MO=GBR*25
[ 1370][V][gps.cpp:724] encode(): Start of GPTXT
[ 1375][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,BS=SOC_BootLoader,V6.2.0.2*34
[ 1384][V][gps.cpp:724] encode(): Start of GPTXT
[ 1389][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,FI=00EF4014*7D
[ 2300][V][gps.cpp:724] encode(): Start of GNGGA
[ 2301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 2302][V][gps.cpp:724] encode(): Start of GNGLL
[ 2307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 2314][V][gps.cpp:724] encode(): Start of GPGSA
[ 2319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 2328][V][gps.cpp:724] encode(): Start of BDGSA
[ 2333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 2342][V][gps.cpp:724] encode(): Start of GLGSA
[ 2347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 2356][V][gps.cpp:724] encode(): Start of GPGSV
[ 2360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 2368][V][gps.cpp:724] encode(): Start of BDGSV
[ 2372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 2379][V][gps.cpp:724] encode(): Start of GLGSV
[ 2384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 2391][V][gps.cpp:724] encode(): Start of GNRMC
[ 2396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 2404][V][gps.cpp:724] encode(): Start of GNVTG
[ 2408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 2416][V][gps.cpp:724] encode(): Start of GNZDA
[ 2420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 2427][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 2433][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 999, timeToFix: 0, gpsFix: 00
[ 2448][E][vfs_api.cpp:105] open(): /sd/aid_ini.ubx does not exist, no permits for creation
[ 2450][E][gps.cpp:1176] aidIni(): Will not send AID_INI - invalid data on SD?
[ 2457][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 2463][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324432249, fTOW: -495361, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:12, delay 164ms
[ 3300][V][gps.cpp:724] encode(): Start of GNGGA
[ 3301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 3302][V][gps.cpp:724] encode(): Start of GNGLL
[ 3307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 3314][V][gps.cpp:724] encode(): Start of GPGSA
[ 3319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 3328][V][gps.cpp:724] encode(): Start of BDGSA
[ 3333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 3342][V][gps.cpp:724] encode(): Start of GLGSA
[ 3347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 3356][V][gps.cpp:724] encode(): Start of GPGSV
[ 3360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 3368][V][gps.cpp:724] encode(): Start of BDGSV
[ 3372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 3379][V][gps.cpp:724] encode(): Start of GLGSV
[ 3384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 3391][V][gps.cpp:724] encode(): Start of GNRMC
[ 3396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 3404][V][gps.cpp:724] encode(): Start of GNVTG
[ 3408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 3416][V][gps.cpp:724] encode(): Start of GNZDA
[ 3420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 3427][V][gps.cpp:724] encode(): Start of GPTXT
[ 3432][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[ 3440][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 3446][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 1998, timeToFix: 0, gpsFix: 00
[ 3454][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 3461][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 324432249 pos: 0, info: 0, hdop: 0, vel: 0, started at 2299
[ 3473][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324433249, fTOW: -495361, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:13, delay 162ms
[ 4300][V][gps.cpp:724] encode(): Start of GNGGA
[ 4301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 4302][V][gps.cpp:724] encode(): Start of GNGLL
[ 4307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 4314][V][gps.cpp:724] encode(): Start of GPGSA
[ 4319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 4328][V][gps.cpp:724] encode(): Start of BDGSA
[ 4333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 4342][V][gps.cpp:724] encode(): Start of GLGSA
[ 4347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 4356][V][gps.cpp:724] encode(): Start of GPGSV
[ 4360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 4368][V][gps.cpp:724] encode(): Start of BDGSV
[ 4372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 4379][V][gps.cpp:724] encode(): Start of GLGSV
[ 4384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 4391][V][gps.cpp:724] encode(): Start of GNRMC
[ 4396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 4404][V][gps.cpp:724] encode(): Start of GNVTG
[ 4408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 4416][V][gps.cpp:724] encode(): Start of GNZDA
[ 4420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 4427][V][gps.cpp:724] encode(): Start of GPTXT
[ 4432][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[ 4440][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 4446][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 2997, timeToFix: 0, gpsFix: 00
[ 4454][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 4461][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 324433249 pos: 0, info: 0, hdop: 0, vel: 0, started at 3299
[ 4473][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324434249, fTOW: -495361, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:14, delay 162ms
[ 5300][V][gps.cpp:724] encode(): Start of GNGGA
[ 5301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 5302][V][gps.cpp:724] encode(): Start of GNGLL
[ 5307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 5314][V][gps.cpp:724] encode(): Start of GPGSA
[ 5319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 5328][V][gps.cpp:724] encode(): Start of BDGSA
[ 5333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 5342][V][gps.cpp:724] encode(): Start of GLGSA
[ 5347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 5356][V][gps.cpp:724] encode(): Start of GPGSV
[ 5360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 5368][V][gps.cpp:724] encode(): Start of BDGSV
[ 5372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 5379][V][gps.cpp:724] encode(): Start of GLGSV
[ 5384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 5391][V][gps.cpp:724] encode(): Start of GNRMC
[ 5396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 5404][V][gps.cpp:724] encode(): Start of GNVTG
[ 5408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 5416][V][gps.cpp:724] encode(): Start of GNZDA
[ 5420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 5427][V][gps.cpp:724] encode(): Start of GPTXT
[ 5432][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[ 5440][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 5446][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 3996, timeToFix: 0, gpsFix: 00
[ 5454][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 5461][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 324434249 pos: 0, info: 0, hdop: 0, vel: 0, started at 4299
[ 5473][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324435249, fTOW: -495361, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:15, delay 162ms
[ 6043][W][gps.cpp:356] sendAndWaitForAck(): Retry to send 0x0406 after 5000ms.
[ 6298][V][gps.cpp:724] encode(): Start of GPTXT
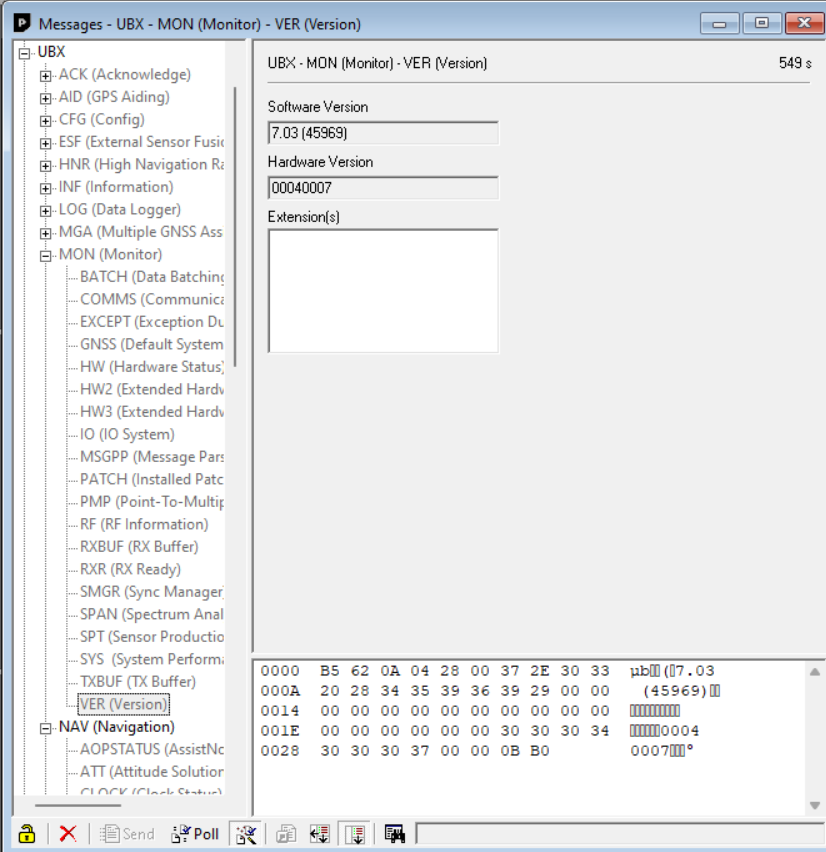
[ 6299][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,MA=CASIC*27
[ 6300][V][gps.cpp:724] encode(): Start of GPTXT
[ 6305][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,HW=ATGM332D,0000090809339*1B
[ 6314][V][gps.cpp:724] encode(): Start of GPTXT
[ 6319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,IC=AT6558-5N-71-0C510800,AH01CLJ-D4-011686*57
[ 6330][V][gps.cpp:724] encode(): Start of GPTXT
[ 6335][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,SW=URANUS5,V5.2.1.0*1D
[ 6344][V][gps.cpp:724] encode(): Start of GPTXT
[ 6348][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,TB=2019-08-12,10:01:41*4E
[ 6358][V][gps.cpp:724] encode(): Start of GPTXT
[ 6362][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,MO=GBR*25
[ 6370][V][gps.cpp:724] encode(): Start of GPTXT
[ 6375][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,BS=SOC_BootLoader,V6.2.0.2*34
[ 6384][V][gps.cpp:724] encode(): Start of GPTXT
[ 6389][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,02,FI=00EF4014*7D
[ 7300][V][gps.cpp:724] encode(): Start of GNGGA
[ 7301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 7302][V][gps.cpp:724] encode(): Start of GNGLL
[ 7307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 7314][V][gps.cpp:724] encode(): Start of GPGSA
[ 7319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 7328][V][gps.cpp:724] encode(): Start of BDGSA
[ 7333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 7342][V][gps.cpp:724] encode(): Start of GLGSA
[ 7347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 7356][V][gps.cpp:724] encode(): Start of GPGSV
[ 7360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 7368][V][gps.cpp:724] encode(): Start of BDGSV
[ 7372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 7379][V][gps.cpp:724] encode(): Start of GLGSV
[ 7384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 7391][V][gps.cpp:724] encode(): Start of GNRMC
[ 7396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 7404][V][gps.cpp:724] encode(): Start of GNVTG
[ 7408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 7416][V][gps.cpp:724] encode(): Start of GNZDA
[ 7420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 7427][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 7433][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 999, timeToFix: 0, gpsFix: 00
[ 7441][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 7447][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 324435249 pos: 0, info: 0, hdop: 0, vel: 0, started at 5299
[ 7460][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324437249, fTOW: -129150, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:17, delay 148ms
[ 8300][V][gps.cpp:724] encode(): Start of GNGGA
[ 8301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 8302][V][gps.cpp:724] encode(): Start of GNGLL
[ 8307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 8314][V][gps.cpp:724] encode(): Start of GPGSA
[ 8319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 8328][V][gps.cpp:724] encode(): Start of BDGSA
[ 8333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 8342][V][gps.cpp:724] encode(): Start of GLGSA
[ 8347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 8356][V][gps.cpp:724] encode(): Start of GPGSV
[ 8360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 8368][V][gps.cpp:724] encode(): Start of BDGSV
[ 8372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 8379][V][gps.cpp:724] encode(): Start of GLGSV
[ 8384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 8391][V][gps.cpp:724] encode(): Start of GNRMC
[ 8396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 8404][V][gps.cpp:724] encode(): Start of GNVTG
[ 8408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 8416][V][gps.cpp:724] encode(): Start of GNZDA
[ 8420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 8427][V][gps.cpp:724] encode(): Start of GPTXT
[ 8432][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[ 8440][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 8446][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 1998, timeToFix: 0, gpsFix: 00
[ 8454][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 8461][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 324437249 pos: 0, info: 0, hdop: 0, vel: 0, started at 7299
[ 8473][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324438249, fTOW: -129150, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:18, delay 162ms
[ 9300][V][gps.cpp:724] encode(): Start of GNGGA
[ 9301][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,,,,,,0,00,25.5,,,,,,*64
[ 9302][V][gps.cpp:724] encode(): Start of GNGLL
[ 9307][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,,V,M*79
[ 9314][V][gps.cpp:724] encode(): Start of GPGSA
[ 9319][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[ 9328][V][gps.cpp:724] encode(): Start of BDGSA
[ 9333][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[ 9342][V][gps.cpp:724] encode(): Start of GLGSA
[ 9347][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[ 9356][V][gps.cpp:724] encode(): Start of GPGSV
[ 9360][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,1,1,00*79
[ 9368][V][gps.cpp:724] encode(): Start of BDGSV
[ 9372][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[ 9379][V][gps.cpp:724] encode(): Start of GLGSV
[ 9384][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,00*65
[ 9391][V][gps.cpp:724] encode(): Start of GNRMC
[ 9396][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,,V,,,,,,,,,,M*4E
[ 9404][V][gps.cpp:724] encode(): Start of GNVTG
[ 9408][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[ 9416][V][gps.cpp:724] encode(): Start of GNZDA
[ 9420][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,,,,,,*56
[ 9427][V][gps.cpp:724] encode(): Start of GPTXT
[ 9432][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[ 9440][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 9446][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 2997, timeToFix: 0, gpsFix: 00
[ 9454][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[ 9461][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 324438249 pos: 0, info: 0, hdop: 0, vel: 0, started at 8299
[ 9473][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 324439249, fTOW: -129150, week 2329, leapS: 18, valid: 0x00 (), tAcc 0ns, DATE: 2024-08-28T18:07:19, delay 162ms
and after letting it run for a couple of minute:
[367079][V][gps.cpp:724] encode(): Start of GNGGA
[367080][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,051901.000,,,,,0,00,25.5,,,,,,*76
[367082][V][gps.cpp:724] encode(): Start of GNGLL
[367087][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,051901.000,V,M*6B
[367095][V][gps.cpp:724] encode(): Start of GPGSA
[367100][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[367109][V][gps.cpp:724] encode(): Start of BDGSA
[367114][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[367123][V][gps.cpp:724] encode(): Start of GLGSA
[367128][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[367137][V][gps.cpp:724] encode(): Start of GPGSV
[367142][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,3,1,10,02,25,262,,08,75,283,,10,62,091,,13,,,14*40
[367152][V][gps.cpp:724] encode(): Start of GPGSV
[367157][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,3,2,10,16,21,183,,21,43,264,26,23,32,050,,27,66,133,*76
[367168][V][gps.cpp:724] encode(): Start of GPGSV
[367173][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,3,3,10,30,06,306,,32,12,123,*7A
[367182][V][gps.cpp:724] encode(): Start of BDGSV
[367186][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[367193][V][gps.cpp:724] encode(): Start of GLGSV
[367198][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,02,70,,,41,86,,,38*60
[367207][V][gps.cpp:724] encode(): Start of GNRMC
[367211][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,051901.000,V,,,,,,,030924,,,M*50
[367220][V][gps.cpp:724] encode(): Start of GNVTG
[367225][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[367232][V][gps.cpp:724] encode(): Start of GNZDA
[367237][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,051901.000,03,09,2024,00,00*4A
[367246][V][gps.cpp:724] encode(): Start of GPTXT
[367251][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[367259][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[367265][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 360419, timeToFix: 0, gpsFix: 00
[367273][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[367279][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 191958000 pos: 0, info: 0, hdop: 0, vel: 0, started at 366079
[367292][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 191959000, fTOW: 66, week 2330, leapS: 18, valid: 0x07 (TOW WEEK UTC), tAcc 0ns, DATE: 2024-09-03T05:19:19, delay 200ms
[367534][D][sensor.cpp:293] isReadyForStart(): Timeout trigger for Left duration 75038 us - echo pin state: 0 trigger: 367459722 start: 367459722 end: 0 now: 367534760
[368079][V][gps.cpp:724] encode(): Start of GNGGA
[368080][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGGA: $GNGGA,051902.000,,,,,0,00,25.5,,,,,,*75
[368082][V][gps.cpp:724] encode(): Start of GNGLL
[368087][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNGLL: $GNGLL,,,,,051902.000,V,M*68
[368095][V][gps.cpp:724] encode(): Start of GPGSA
[368100][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSA: $GPGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*02
[368109][V][gps.cpp:724] encode(): Start of BDGSA
[368114][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSA: $BDGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*13
[368123][V][gps.cpp:724] encode(): Start of GLGSA
[368128][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSA: $GLGSA,A,1,,,,,,,,,,,,,25.5,25.5,25.5*1E
[368137][V][gps.cpp:724] encode(): Start of GPGSV
[368142][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,3,1,10,02,25,262,,08,75,283,,10,62,091,,13,,,14*40
[368152][V][gps.cpp:724] encode(): Start of GPGSV
[368157][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,3,2,10,16,21,183,,21,43,264,26,23,32,050,,27,66,133,*76
[368168][V][gps.cpp:724] encode(): Start of GPGSV
[368173][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPGSV: $GPGSV,3,3,10,30,06,306,,32,12,123,*7A
[368182][V][gps.cpp:724] encode(): Start of BDGSV
[368186][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA BDGSV: $BDGSV,1,1,00*68
[368194][V][gps.cpp:724] encode(): Start of GLGSV
[368198][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GLGSV: $GLGSV,1,1,02,70,,,40,86,,,38*61
[368207][V][gps.cpp:724] encode(): Start of GNRMC
[368212][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNRMC: $GNRMC,051902.000,V,,,,,,,030924,,,M*53
[368221][V][gps.cpp:724] encode(): Start of GNVTG
[368225][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNVTG: $GNVTG,,,,,,,,,M*2D
[368233][V][gps.cpp:724] encode(): Start of GNZDA
[368237][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GNZDA: $GNZDA,051902.000,03,09,2024,00,00*49
[368246][V][gps.cpp:724] encode(): Start of GPTXT
[368251][I][gps.cpp:1156] parseNmeaMessage(): Unparsed NMEA GPTXT: $GPTXT,01,01,01,ANTENNA OK*35
[368259][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[368265][V][gps.cpp:899] parseUbxMessage(): NAV-STATUS uptime: 361418, timeToFix: 0, gpsFix: 00
[368273][V][gps.cpp:688] encode(): Expecting UBX Payload: 16 bytes
[368280][W][gps.cpp:1212] prepareGpsData(): Had to switch incomplete record tow: 191959000 pos: 0, info: 0, hdop: 0, vel: 0, started at 367079
[368292][I][gps.cpp:1082] handleUbxNavTimeGps(): TIMEGPS: iTOW: 191960000, fTOW: 66, week 2330, leapS: 18, valid: 0x07 (TOW WEEK UTC), tAcc 0ns, DATE: 2024-09-03T05:19:20, delay 201ms
[368716][D][sensor.cpp:293] isReadyForStart(): Timeout trigger for Right duration 75077 us - echo pin state: 0 trigger: 368641430 start: 368641430 end: 0 now: 368716507
I hope it helps





{kind=link}
{kind=link}