
Ideal ist das sicher nicht. Aber wo soll ich jetzt 140V her bekommen? 
Auf dem Original HC04 ist es ja auch so gemacht. Dazu kommt noch, dass ich das bislang noch nicht mit den korrekten Transducern getestet habe, sondern mit irgendwelchen die ich hier rumliegen hatte. Und das Signal was hinter den ersten drei Opamps raus kommt sieht eigentlich gut aus. Wie gesagt, ich muss jetzt erstmal die Schaltung vernünftig aufbauen auf dem Eval-Board und dann sehe ich weiter.
Was ich da vergessen hatte: Platinen sind zwar da, Bauteile aber noch nicht.
Moin,
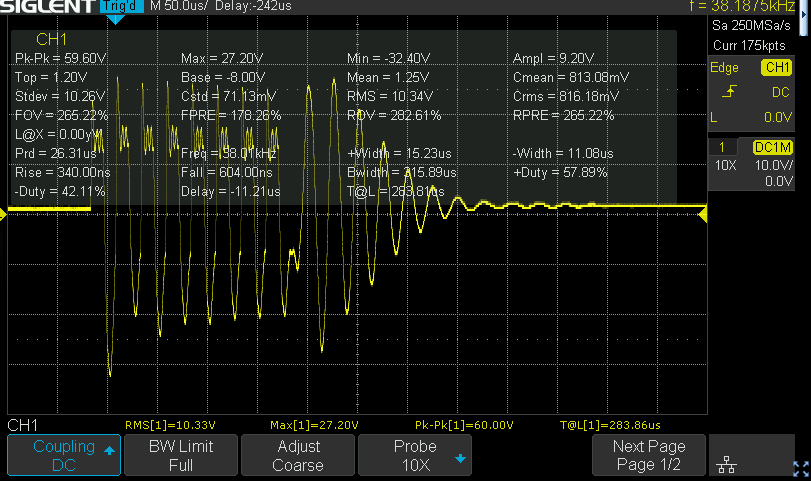
ich hatte hier auch was mit 130…135 Volt gemessen mit denen vom OBS. Könnte es die nächsten Tage nochmal wiederholen und hier einen Screenshot vom DSO einstellen… falls Bedarf besteht.
… So, ist ein anderer als der damalige OBS (für mich: 02): Liegt auf dem Tisch… Echo in maximal 50 cm wenn er eh nicht die Tischfläche selber erkennt:
Signal_OBS_54cm|690x406
Und der andere Sensor mit Echo in 2.5 m:
HTH, Olaf
Joa, interessant wäre es schon. Aber erstmal nicht nötig, um weiter zu machen.
Update:
Meine Ultraschall-Test-Platine ist bestückt und ausprobiert. Nachdem ich ein paar gravierende Bugs in dem Schaltplan gefixt hatte, funktioniert das jetzt auch so grob. Allerdings nicht wirklich gut. Mit den wasserdichten Sensoren, die ich einsetzen wollte, beträgt die Reichweite gerade mal ~2m. Wenn ich stattdessen irgendwelche anderen Sensoren anschließe, die ich noch rumfliegen hatte, habe ich so viel Pegel, dass ich die Verstärkung um Faktor 10 runter fahren muss und die Reichweiten sind entsprechend besser.
Die Sensoren sind also nicht so geil. Ich sehe jetzt zwei mögliche Lösungen: Entweder wir verwenden nicht wasserdichte Sensoren, die wohl ne Ecke empfindlicher sind oder ich tausche den Opamp gegen was vernünftiges mit Faktor 10 weniger Rauschen (NE5532 statt LM324). Das wäre ein wenig teurer, womit ich weniger ein Problem hätte. Problematischer ist, dass ich vermutlich noch mal Teile bestellen müsste zum Testen.
Ich schlafe da auf jeden Fall noch mal ne Nacht drüber…
1 „Gefällt mir“
Ach ja, die bisher geplanten US-Sensoren haben noch einen Nachteil: Die Beinchen stehen hinten raus wie Kraut und Rüben. Schief, nicht mittig, … also nicht geeignet für einlöten und dann anschließend passig in ein Gehäuse pressen.
Du bist ja richtig auf Zack, Klasse 
die große Fertigungstoleranz ist natürlich ärgerlich, aber ich würde eher nur diesen Sensor abschreiben, nicht die wasserdichten im allgemeinen. Ich habe für die US sensoren in einem modifizierten OBS (simpleOBS [keine PCB, angepasste Firmware, weniger Teile Prototyp]) einen Spalt (2 mm, viel Raum für Fertigungstoleranzen) zwischen Sensor und Gehäuse gelassen und mit Flexi Silikonkleber gefüllt, ich erhoffe mir so, dass sicher kein Wasser rein kommt, und auch Erschütterungen zu weniger Falschmessungen führen.
Blockzitat
Update: … oder ich tausche den Opamp gegen was vernünftiges mit Faktor 10 weniger Rauschen (NE5532 statt LM324)…
wie viel Verstärkung hast du denn gerade gesamt? Nachteil bei zuviel verstärkung, auch bei wenig Grundrasuchen, sind halt vermutlich mehr falschpositive Signale, bzw mehr Arbeit die raus zu rechnen. ich bin der Meinung es wäre geschickter erstmal den US Transducer aussreichend stark anzuregen. Das ist wohl leider der Nachteil der geschlossenen, wasserdichten Sensoren im allgemeinen:

generell lohnen sich alle PGA460 AppNotes denke ich, konnte erst zwei überfliegen:
- es werden immer Trafos mit zwei Primärspulen und einer Sekundärspule verwendet und die Primärspulen abwechselnd geschalten.
- PGA460 hat 7nV/Hz noise also fast so wenig wie NE5532, aber es wird trotzdem immer mit >100Vpp angeregt, ist also wohl notwendig?
- auch Intersant für Firmware mal, bei nahen Objekten wird nur 3 mal gepulst bei weiten 20 mal
Hmm… ja, über die Sensoren bin ich auch schon gestolpert. Die Transducer könnten die GU1812A-40TR sein. Sind bezahlbar, verfügbar und haben im Datenblatt Abmessungen und Position der Pins gegeben, könnte also passen 
Ja, das mit den Transformatoren ist so eine Sache. Ehrlich gesagt habe ich da keinen Bock drauf Vor allem, wenn man die noch tunen muss (oder sind das nur Spulen auf den aktuell verwendeten Boards?). Ich habe noch ein paar Optionen, die ich vorher ausprobieren möchte.
Geplant ist aktuell aber auch der Einsatz eines MAX232 (oder ähnlichem), um wenigstens ~16Vpp hinzubekommen. Aber klar, 100Vpp wären halt noch mal 16dB mehr, was rechnerisch noch mal die ~2,5x Reichweite wäre.
Öhh, das verstehe ich jetzt nicht so ganz. Also Verstärkung ist aktuell rund 1000x. Klar will man das so auslegen, dass das Rauschen nicht als Ziel erkannt werden würde. Aber wenn ich weniger Rauschen habe, kann ich mehr verstärken und erkenne somit noch kleinere Ziele.
wenns ohne Transformator geht, wärs natürlich umso besser. was mich am ehesten stört bei den Trafos für Transducer , entweder sie sind teuer (~4€) oder ich find sie nur auf Aliexpress und da weiß man nie 100% was man bekommt.
Ich meinte, dass ich mir vorstellen kann, dass mit mehr Verstärkung auch die Falschmessungen zu nehmen, welche hier im Forum beschrieben wurden und auf äußere Einflussen wie Temperatur, Erschütterung, Motorradlärm… zurück geführt wurden. Weil halt nicht nur der eigentliche Ultraschallempfang verstärkt wird, sondern auch jedes anders kleine Signal (woher auch immer das kommen mag).
interessant, danke fürs messen:)
wie viel Volt warn da auf der Primärseite? 3.3 V oder 5 V?
Mit wem sprichst du? Worauf bezieht sich das?
1 „Gefällt mir“
Kurzes Update von mir: Ich habe ein wenig weiter an der Ultraschall-Schaltung gearbeitet und bin ein Stück weiter gekommen. Vor allem habe ich verschiedene Transducer untersucht und die Quintessenz ist eigentlich einfach und vermutlich auch logisch: Gekapselte Sensoren sind Mist und größer ist besser. Zum Testen habe ich die Sensoren einfach in 20cm Abstand zueinander platziert, allen das selbe Signal gegeben und den Pegel am zweiten Sensor gemessen. Der Aufbau ist vermutlich nicht optimal was die Impedanzen angeht, sagt aber hoffentlich etwas über die grobe Richtung aus. Für jedes Paar habe ich zunächst die optimale Frequenz bestimmt. Hier sind Unterschiede von bis zu 40 dB! Mit Abstand am besten haben ein paar alte Sensoren abgeschnitten, die ich hier noch rumfliegen hatte. Diese waren auch mit Abstand am größten und waren nicht gekapselt.
Bei den Sensoren von LCSC schnitt das Paar GU1008C-40T/R (C242178) am besten ab.
Ich habe die Sensoren dann in meine aktuelle Schaltung (mit dem NE5532 + LM393) gelötet und erste Experimente sind vielversprechend. Allerdings funktioniert die Mute-Schaltung noch nicht so ganz. Problem hierbei ist, dass das Signal zu Beginn so stark ist, dass es ~0,7V unter GND gezogen wird und dort clippt. Da ich den Comparator am anderen Eingang maximal nach GND runterziehen kann, toggelt der halt fleißig weiter. Habe mir da noch keine weiteren Gedanken gemacht.
Unterm Strich bedeutet das, dass ich wohl die Idee der vollständigen Wasserdichtigkeit zunächst aufgeben werde/muss. Aber ich denke auch, dass es sinnig ist sonst erstmal eine Version mit einfacherer Hardware zu machen, um voran zu kommen statt ewig zu planen.
5 „Gefällt mir“
Hallo fabian,
meinst Du den Nachschwinger des Übertragers (das sog. „Ringing“)?
Vielleicht hilft ein SNUBBER, den es im PDF schematic (oben weiter) nicht gibt. Lies mal dies: https://www.musikding.rocks/index.php?attachment/421590-calculating-rc-snubber-de-pdf/
Wasserdichtheit:
Du willst ja keine wasserdichte Uhr (Wasser, welches einmal drin ist, geht nie wieder raus…). Deswegen denke an eine DAE-Membrane, wie diese hier 6er-Set Druckausgleichsmembran, 12 mm Durchmesser, selbstklebend | Bauteile / Komponenten | ELV Elektronik
Auch super ist sowas wie FS190 (Tränkmittel: Elmotherm® FS 190), das kann man draufpinseln oder drübergießen. Trocknen dauert etwas (wir haben in der Firma dafür Öfen benutzt).
Vielleicht hilft Dir ja einer der Tipps weiter.
Moin,
also, ich denke hier gab es ein paar Missverständnisse:
Ich habe keinen Übertrager. Um das Ringing geht es nicht, sondern das Übersprechen zwischen den zwei Sensoren (ich rede hier von den einzelnen Transducern, nicht den Modulen). Da hilft auch kein Snubber, denn ich sende nun mal mit Vollgas und das soll bitte auch so bleiben. Was der andere dann empfängt, empfängt der halt. Daher der anschließende Mute-Circuit, um den Ausgang stumm zu schalten. Neuer Plan: Den Ausgang vom Comparator (hinter einem Widerstand) einfach mit einem Fet nach GND ziehen, dann ist Ruhe, braucht halt zwei Bauteile mehr.
Und was die Wasserdichtigkeit angeht: Ja, es war immer nur mit Spritzwasser gerechnet und ich weiß, dass man da tunlichst ein Loch unten drin lassen sollte. Was mir jetzt eine Membran oder das Tränkmittel bringen soll, um den von sich aus nicht wasserdichten Ultraschallsensor wasserdicht zu bekommen ist mir nicht so ganz klar. Ich kann das ja schlecht vorne in den Sensor schmieren.
1 „Gefällt mir“
@fabian,
ja, das sind Mißverständnisse, weil ich nicht alle Deine Gedanken lesen kann.
Das gegenseitige Übersprechen… Hm, davon war oben nicht dir Rede bzw. ich hab´s nicht verstanden.
Weitere Idee: Reicht es vielleicht aus, die Transducer abwechselnd statt zugleich anzusteuern? Nach 50ms ist sicher auch der Nachhall verklungen - wenn also im Wechsel angesteuert würde, hört eines immer nur sein eigenes Geräusch.
„dass ich wohl die Idee der vollständigen Wasserdichtigkeit zunächst aufgeben werde/muss.“:
Meine Einlassungen beziehen sich nicht auf die Transducer allein, sondern auf das System als Ganzes. Was helfen Dir die wasserdichten Transducer, wenn irgendwo Wasser reinkommt. Dazu waren meine Ideen gedacht.
Wasserdicht, die 2.:
Wozu muss das denn ‚dicht‘ sein? Was ist Dein Ziel? IP65? IP67?
IP54 ist weit mehr als genug, vermute ich.
Da es Dir aber momentan um die Transducer ging und da keine brauchbaren Modelle zur Verfügung stehen, ist das jetzt akademisch, drüber nachzudenken, oder?
Ich habe aber nioch nicht verstanden, wieso die JSN-SR04T (die ja wasserdicht sein sollten) nicht gehen? Im bisherigen OBS tun sie es doch weitgehend - und mehr als 3m weit müssen die nicht messen.
Ich bin mir recht sicher, dass ich bereits mehrfach über das Übersprechen gesprochen habe und auch bereits im ersten Beitrag die Funktion des Mute-Pins erklärt habe. Es geht hier nicht um das Übersprechen zwischen zwei Sensor-Einheiten, sondern um das Übersprechen zwischen Sender und Empfänger einer Einheit.
Was die Wasserdichtigkeit angeht: Ich meine damit Spritzwassergeschützt, also ja, IPx4 reicht. Und ja, es geht erstmal nur um die Transducer, alles andere bekommt man denke ich irgendwie hin. Kernidee war das Gehäuse in zwei Hälften in der Vertikalen zu teilen und mit einem O-Ring abzudichten.
Gegen die JSN-SR04T spricht zunächst einmal, dass es Module sind und ich aktuell auf der Suche nach einer Schaltung bin, die ich integrieren kann. Man könnte jetzt die reinen Transducer davon benutzen, das hat aber zwei gravierende Nachteile: Die sind zwar selbst Wasserdicht, aber sie schließen nicht wasserdicht gegen das Gehäuse ab. Und die sind auch so blöd gebaut, dass ich keine Möglichkeit sehe das dicht zu bekommen, ohne zu kleben. Mich stört auch das Kabel, was man dann kürzen und verlegen muss. Aktuell wären die Transducer direkt auf die Platine gelötet. Dazu kommt noch, dass die ca. drei mal so teuer sind wie die die ich aktuell einplane, wobei das jetzt kein Killer-Kriterium wäre.
1 „Gefällt mir“
Nach etwas delay mal wieder ein kurzes Update: Ich habe mir noch mal 5 Gedanken über die Ultraschall-Platine gemacht, habe ein paar Sachen verbessert und erstmal eine Test-Platine bestellt. Dauert jetzt erstmal wieder 2…3 Wochen bis das alles da ist und ich weiter testen kann. Bin 70% sicher, dass das dann endlich klappt
2 „Gefällt mir“
So, pünktlich 3 Wochen später das nächste Update: Die neue Platine für den Ultraschallsensor funktioniert quasi perfekt - und das auf Anhieb ohne Änderungen der Schaltung 
Ohne das großartig optimiert zu haben, kann ich Entfernungen bis mindestens 3,5m (mehr erlaubt die Software aktuell nicht und bin zu faul die jetzt noch mal zu ändern) messen. Und ich habe noch nicht großartig optimiert.
Heißt also, ich werde vermutlich morgen mal die aktuelle US-Schaltung in den Gesamtschaltplan übernehmen und mit dem Routing anfangen.
Da ich bislang keine wirklich sicher klingende Aussage dazu gehört habe, dass man den ESP dazu bewegen kann den ganzen US-Kram mit zu übernehmen werde ich 1-2 STM8 vorsehen, die das ganze übernehmen. Dazu wäre interessant von jemandem der sich mit der Firmware auskennt zu erfahren wie die zwei Sensoren vom Timing her betrieben werden. Werden beide Trigger-Signale zusammen ausgelöst? Direkt nacheinander? Alternierend mit gleichem Abstand zueinander? Der STM8 kann sich halt nur um ein Event zur Zeit kümmern und es muss möglichst ausgeschlossen sein, dass zwei Detektionen gleichzeitig rein kommen. Wenn mir das niemand sagen kann oder das passieren kann, würde ich zwei STM8 vorsehen - die kosten ja fast nichts
2 „Gefällt mir“
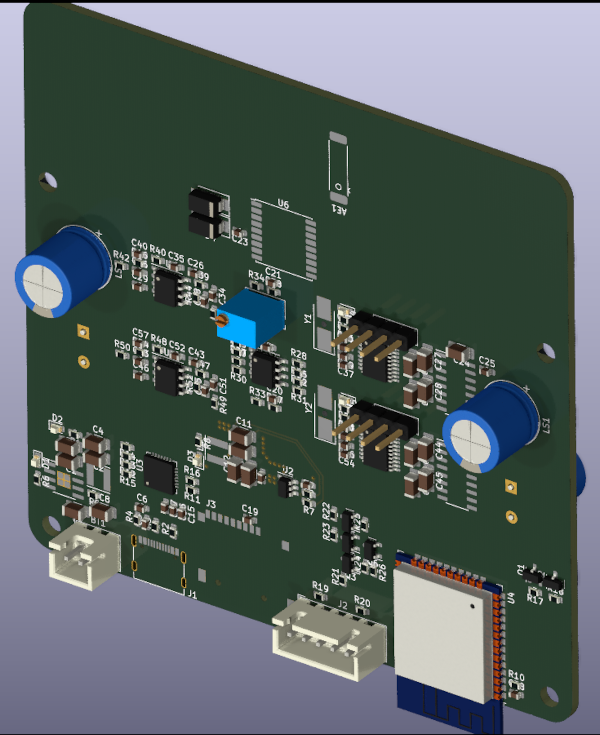
Schaltplan ist „fertig“, alles hat Footprints, Teilenummern etc und alle Teile sind grob platziert.
Die dicken Elkos sind momentan noch die Platzhalter für die Transducer. Oben ist so und muss so viel Platz für die GPS Antenne. Das ganze Board ist jetzt 90x95mm² groß, viel kleiner wird es wohl nicht mehr, vielleicht 90x90.
{kind=link}
5 „Gefällt mir“